Lego Mindstorms NXT Camera
Semester Thesis by Leo den Hartog
Introduction
Lego Mindstorms NXT
is a versatile robotics platform that is widely
used for teaching purposes at schools and universities. Unfortunately,
the visual capabilities of the standard Mindstorms NXT platform are
very limited because only a simple light-dependent transistor is
available as a sensor for visual input. This severely narrows the scope
of robotic applications.
The goal of this project is, therefore, to couple a video camera with the
Mindstorms NXT, enabling NXT-based robots to orient themselves in their
environment, extract information from the environment, and react to it.
The camera used is the
CMUcam3, an open source
programmable embedded color vision platform. Using the CMUcam3 allows to
process images on the vision platform and communicate only the results
to the NXT, see the system overview in Fig. 1.
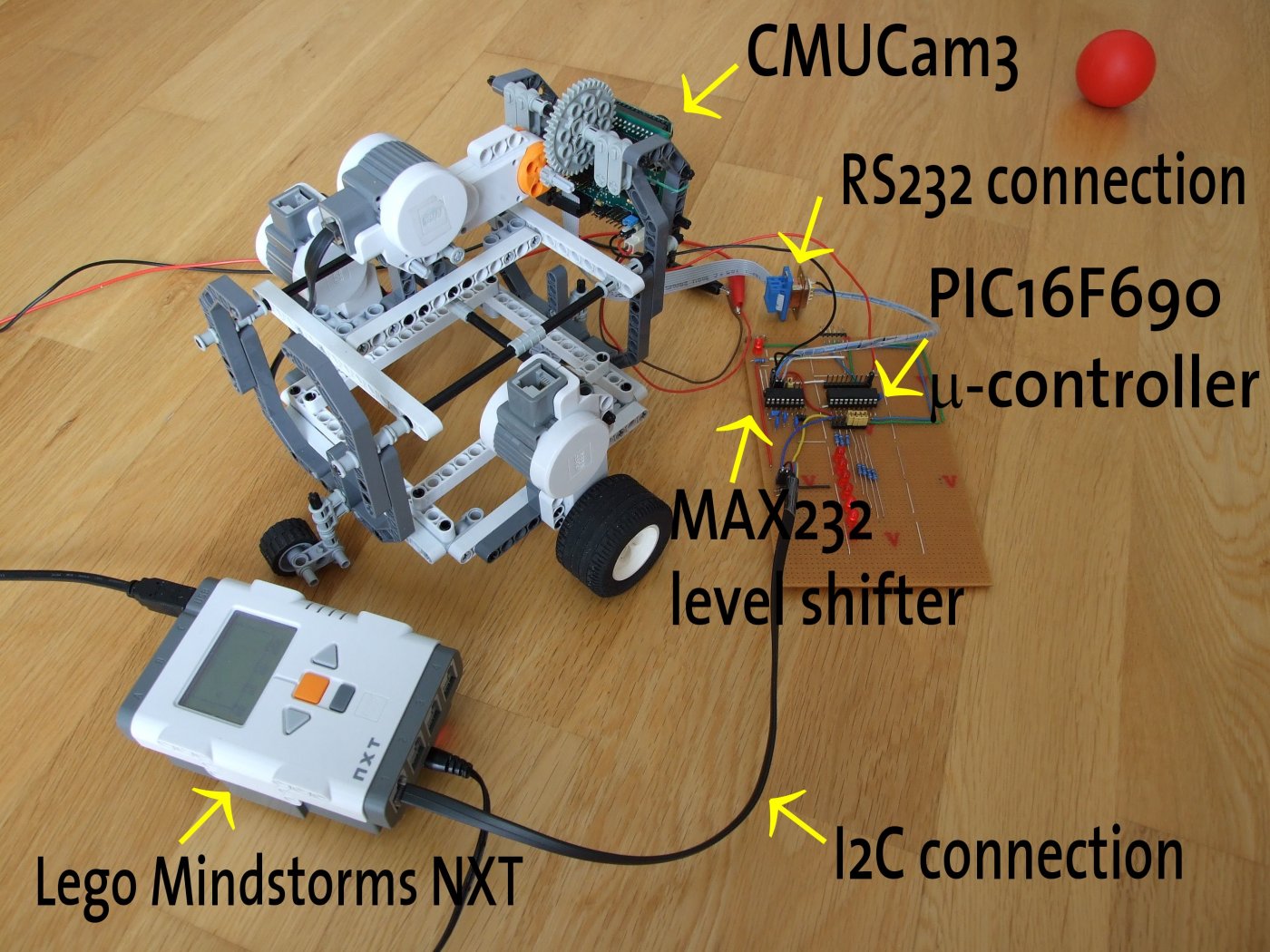
|
| Figure 1: CMUcam3 coupled with Lego Mindstorms NXT. |
I2C-to-RS232 Bridge
The connection between the CMUcam3 and the NXT has been realized using a I2C-to-RS232 bridge. This bridge connects an I2C sensor input of the NXT to the RS232 port of the CMUcam3. The implementation of the I2C-to-RS232 bridge is based on the PIC16F690 microcontroller. Using the PIC16F690 has the advantage that almost no additional circuitry is required, as can be seen in Fig. 2 and Fig. 3.
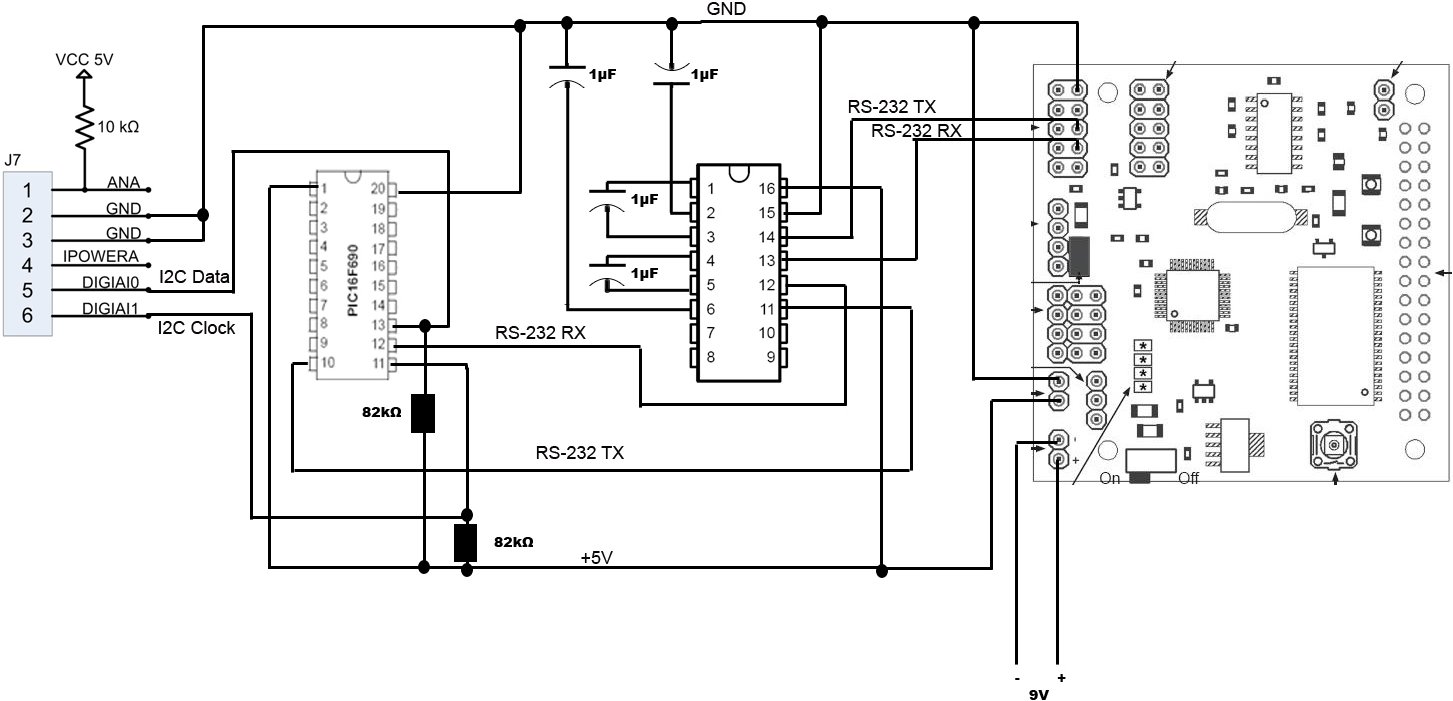
|
| Figure 2: Schematic of the I2C-to-RS232 bridge. |
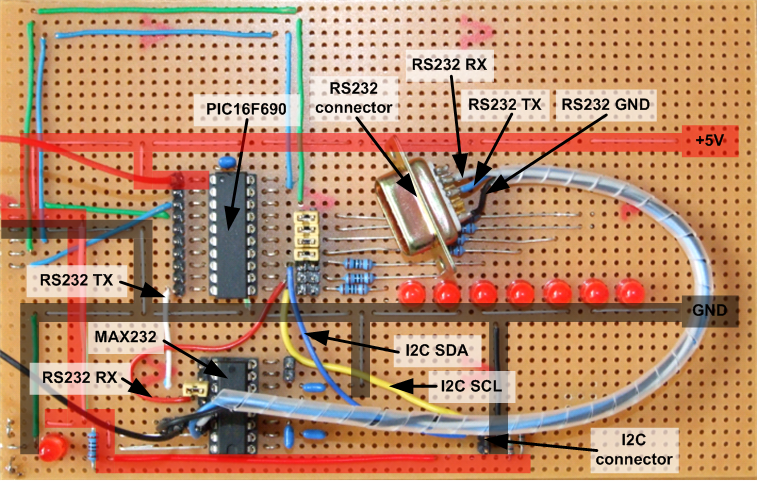
|
| Figure 3: Prototype of the I2C-to-RS232 bridge. |
Resources
• The project report is available for download: semester thesis.• Recently, the implementation has been improved (we recommend to use this implementation): semester thesis update.
• The assembly code for the I2C-to-RS232 bridge of the improved version is available here: PIC16F690 assembly code.
• The code for the NXT of the improved version is available here: NXT code.
Video
Watch this one-minute video and get an impression how the system finally works. ImpressiveFigure 4: Lego Mindstorms NXT CMUcam3 youtube video